PUTSLAM
This page covers the work on SLAM system developed at Poznan University of Technology.
Git repository: http://github.com/LRMPUT/PUTSLAM
07.2016
We summarized some results obtained by PUTSLAM in following youtube video:
The video is also available at link.
02.2016
We summarized some results obtained by PUTSLAM in following youtube video:
The video is also available at link.
21.12.2015
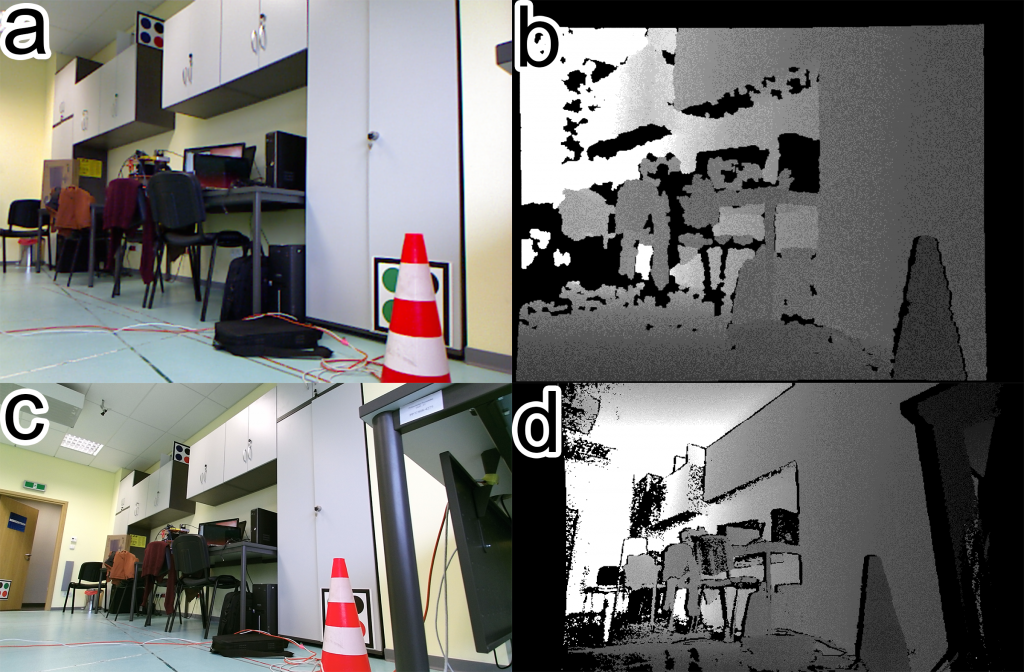
We publicly provide the PUT Kinect 1 & Kinect 2 data set (PUTKK data set) that contains RGB and depth images recorded from a mobile robot equipped with the Kinect v1 and the Kinect v2, and operating while observed by ceiling cameras providing the ground truth information. The aforementioned data set allowed to compare both sensors and is a great opportunity to compare your RGB-D visual navigation algorithm with the new Kinect v2 and the old Kinect v1 in the same environment. More information can be found in our subpage.
10.07.2015
On this page we provide a specific RGB-D data set collected using an Asus Xtion Pro Live sensor mounted on the six-legged autonomous robot Messor II. The data set containing RGB and depth images for three different sequences, along with ground truth sensor trajectories. The RGB-D frames were recorded at the frame rate of 15 Hz in order to synchronize the RGB-D data registration with the frame rate of the overhead camera used to register the ground truth. The procedure used to obtain the ground-truth trajectories is described in detail in the paper [1]. This paper gives also a detailed description of all three experiments, including the parameters of walking robot motion. The data set is structured in three ZIP files – each one contains complete data necessary to run your own RGB-D SLAM or visual odometry software, and the ground truth trajectories. The ground truth data can be used to evaluate the accuracy of the obtained sensor trajectories by applying the ATE and/or RPE metrics provided with the well-known TUM RGB-D benchmark. Please refer to [1] when using this data.
Links to data:
References:
[1] D. Belter, M. Nowicki, P. Skrzypczy\’nski,
Evaluating Map-based RGB-D SLAM on an Autonomous Walking Robot,
in: Progress in Automation, Robotics and Measuring Techniques, (R. Szewczyk, et al., eds.), AISC, Springer, 2016 (submitted).
BibTeX entry:
@InProceedings{automation2016,
author = „Dominik Belter and Michal Nowicki and Piotr Skrzypczynski”,
title = „Evaluating Map-based RGB-D SLAM on an Autonomous Walking Robot”,
booktitle = „Progress in Automation, Robotics and Measuring Techniques”,
editor = „R. Szewczyk, et al.”,
publisher = „Springer”,
series = „AISC”,
year = „2016”,
}
Acknowledgment:
We would like to thank students Zgoliński and Okoniewski for their contribution in creation of the presented results.
Researchers participating in the NCN project:
- Michal Fularz
- Marek Kraft
- Adam Schmidt
- Krzysztof Walas
- Jan Wietrzykowski
This project was financed by the National Science Centre, Poland (NCN) under decision DEC-2013/09/B/ST7/01583 in years 2014-2016