Smartphone localization
Personal indoor localization on mobile devices is crucial for navigational, markerting or safety purposes. Unfortunately, the GPS does not work indoors, UWB solutions require additional receiver and the most common iBeacon solution requires to mount those beacons in the environment, adapt their position in case of environmental changes, take care of batteries and can be overall expensive for larger environments. Our solution is different as:
- it requires Android device,
- we work with the environment as it is,
- we process data on mobile device.
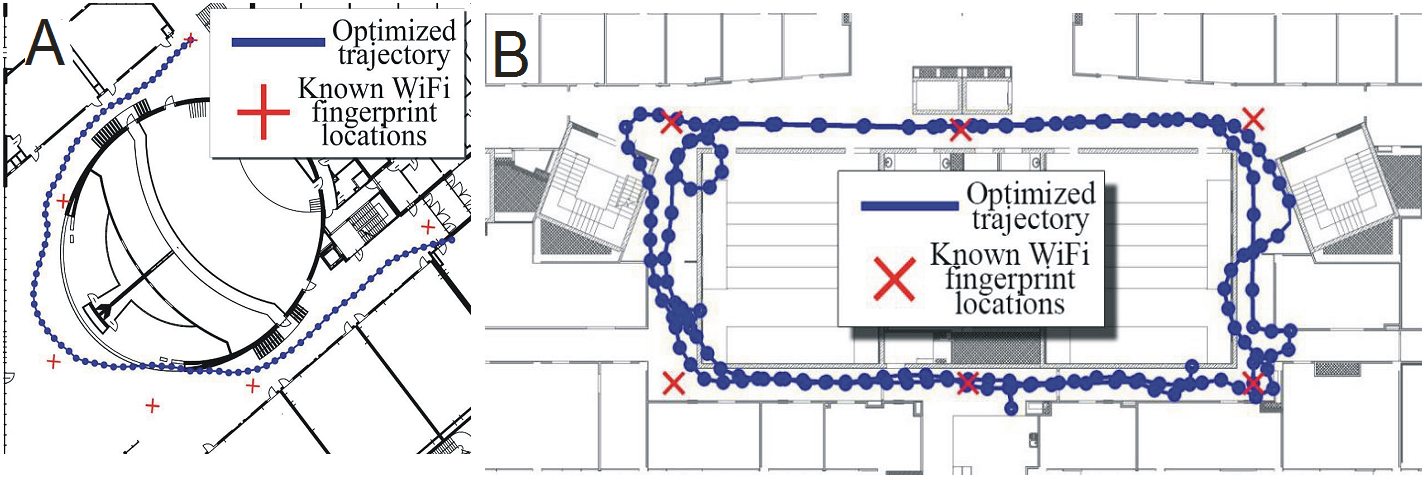
To do this, we fuse data by factor graph from:
- accelerometer, magnetomer, gyroscope
- WiFi adapter
- barometer
- camera
Short video is available below:
The old version is available at github.com.
It is also possible to compare raw results without the fusion algorithm:

And after the data is fused to produce a final trajectory (fusion happens real-time during operation):
2017 & Preprints:
A recent articles are available at the personal website of Michal Nowicki – link.
2016:
- M. Nowicki, J. Wietrzykowski and P. Skrzypczyński, „Experimental Evaluation of Visual Place Recognition Algorithms for Personal Indoor Localization”, in International Conference on Indoor Positioning and Indoor Navigation (IPIN 2016), 2016.
Bibtex, Presentation - M. Nowicki, M. Rostkowska and P. Skrzypczyński, „Indoor Navigation using QR Codes and WiFi Signals with an Implementation on Mobile Platform”, in IEEE Signal Processing Conference (SPA 2016), p. 156-161, Poznań, Poland,
Bibtex, Presentation
2015:
- J. Gośliński, M. Nowicki, and P. Skrzypczyński, „Performance comparison of EKF-based algorithms for orientation estimation on Android platform”, Sensors Journal, IEEE, IF: 1.852, 15(7):3781–3792, July 2015.
IEEE Explore, Bibtex - M. Nowicki and P. Skrzypczyński, „Indoor navigation with a smartphone fusing inertial and WiFi data via factor graph optimization”, in Mobile Computing, Applications, and Services: 7th International Conference, MobiCASE 2015, Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering (LNICST), vol. 162, p. 280-298, Springer International Publishing, 2015.
Springer, Bibtex, Presentation - M. Nowicki, J. Wietrzykowski, and P. Skrzypczyński, „Simplicity or flexibility? Complementary Filter vs. EKF for orientation estimation on mobile devices”, in Cybernetics (CYBCONF), 2015 IEEE 2nd International Conference on, p. 166–171, June 2015.
IEEE Explore, Bibtex, Presentation
2014:
- M. Nowicki, „WiFi-guided visual loop closure for indoor localization using mobile devices”, Journal of Automation, Mobile Robotics & Intelligent Systems (JAMRIS), 8(3):10–18, 2014.
PDF, Bibtex - M. Nowicki and P. Skrzypczyński, „Performance comparison of point feature detectors and descriptors for visual navigation on android platform”, in International Wireless Communications and Mobile Computing Conference (IWCMC), p. 116–121, Aug. 2014.
IEEE Explore, Bibtex, Presentation - M. Fularz, M. Nowicki, and P. Skrzypczyński, „Adopting feature-based visual odometry for resource-constrained mobile devices”, in Image Analysis and Recognition, Lecture Notes in Computer Science, vol. 8815, p. 431–441, Springer International Publishing, 2014.
Springer, Bibtex, Presentation
Theses:
- M. Nowicki, „Development and implementation of a visual odometry algorithm for mobile devices”, MSc thesis, Automatic Systems and Robotics, supervisor: P. Skrzypczyński, Ph.D, 2014.
PDF Bibtex
Project „A new method for the fusion of quantitative and qualitative information using factor graph optimization for the simultaneous localization and mapping problem”, grant no. 2015/17/N/ST6/01228, supported by the National Science Centre under the „PRELUDIUM” programme in years 2016-2019.
Project „New methods supporting human navigation using resources of mobile systems like a smartphone or a tablet”, grant no. DI2012 004142, supported by Ministry of Science and Higher Education under the „Diamond Grant” programme in years 2013-2016.